













Úgy látszik, az új-zélandi Jason McVay megelégelte, hogy nem talált olyan basszgitárost, amilyenre szüksége lett volna, gondolt hát egyet és megépítette inkább a robotbasszert a helyi Victoria egyetemen, ahol végzős hallgató.
Kiindulása teljesen praktikus, mérnöki megközelítésű volt, nem vacakolt a hagyományos hangszerrel, hanem a leghasználhatóbb és legegyszerűbb megoldáshoz folyamodott. A basszerrobothoz először egy olyan egységet csinált, mely képes egy húrt különböző hangmagasságokban megszólaltatni, majd megnégyszerezte ezt.
")
Igen, ez egy basszgitárt terve. Csak éppen robotizált. (James McVay képe)
A húr egy alumínium idomból készül fémvázra van feszítve.
")
Ilyen alu idomból készült a váz (James McVay képe)
Ezen a vázon mozog egy olyan kocsimechanika, ami a nyomtatók fejéhez hasonlóan készült és egy kis műanyag elemmel és pár lineáris szolenoiddal működtetett „bundfogó” van rajta, ami tulajdonképpen a húrt lefogja.
")
A "kocsi" a szorítómechanikával, ami a húrt lefogó ujj szerepét tölti be (James McVay képe)
A húr egyébként a kocsimozgató mechanika egyik oldalon rögzített szerkezetéhez van erősítve és hagyományos gitárhangolóval kulccsal behangolva.
")
A kocsimozgató szerkezet, felette a hangolókulccsal (James McVay képe)
A pengetőmechanika már jóval bonyolultabbnak tűnik: a megfelelő gyorsaság és a pengetés erősségének befolyásolásának biztosítása nem könnyű feladat. Egy forgó motorra 8 pengetőt magába foglaló tartó került, a motort pedig egy szervó mozgatja közelebb-távolabb a húrtól, így befolyásolva a pengetés dinamikáját.
")
A pengetőrendszer - forgó "tár", a dinamikát szabályzó szervóval, mely a húrhoz képest a helyzetét változtatja. (James McVay képe)
Ez még nem minden. A még jobb és dinamikusabb pengetéshez ugye nem árt, ha tompítani is lehet. Ehhez egy sorompószerű karos rendszert tervezett Jason, mely nem csak ki-be kapcsolt állapotban lehet, hanem egy finom szervómeghajtással még a tompítás erősségét is befolyásolhatja.
")
A tompító szervómozgatású karja (James McVay képe)
A következő fontos egység a hangszedő. Itt is újított Jason: a sokféle szervó, léptetőmotor, szolenoid elég rendes elektromágneses „zajt” generál, ami gyakorlatilag lehetetlenné teszi a hagyományos mágneses hangszedő használatát. Ehelyett egy optikai elven működő pickup került bele: infravörös LED és érzékelő közt van a húr, az érzékelő távolsága állítható, hogy a különböző vastagságú húrokhoz kalibrálni lehessen.
")
Infrás optikai hangszedő, állítható magassággal (James McVay képe)
Az egész vezérlését a hobbielektronikákat barkácsolók körében jól ismert Arduino-kompatibilis rendszerrel oldotta meg. A vezérlőegység MIDI jelből dolgozik, ennek megfelelően mozgatja a különböző mechanikákat.
")
A vezérlőegység (James McVay képe)
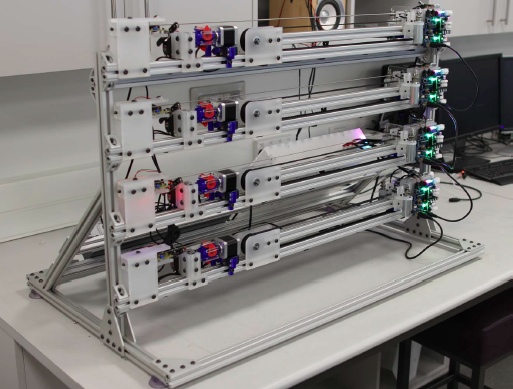
Ezután az egyes egységeket csak meg kellett négyszerezni és már kész is volt a MechBass.
"Ecce MechBass!" (James McVay képe)
A tápellátást egy 450W 24V-os tápegység biztosítja.
")
A tápegység (James McVay képe)
A végeredmény pedig itt látható és hallható. Elég meggyőző, nem?
Hmm, azt hiszem, lassan fel kell készülnünk, hogy a következő fellépésen már egy robotbanda lesz az előzenekar… végtére is, innen már csak megfelelő szoftver és algoritmus kérdése a „humanizálása”. 🙂
Forrás: Guitarify
 |
Az igazi menő ajándék gitárosoknak: AMULETTA nyaklánc kézműves pengető medállal! |
Fejet hajtok a mérnöki ötletek és megvalósítások előtt. De az emberi ujjak és agyi tevékenységek összhangja a maga hibáival együtt csodálatos. De ilyen ötletet van aki 3D-s programokkal valósít meg. Íme:
http://www.youtube.com/watch?v=toXNVbvFXyk
Laci
Igazad van Laci, én is csak poénkodtam vele 🙂